Research Update
Undersea vehicles look deep to watch offshore aquaculture pens
By Rebecca Milne and Gerhard Pohle
 As fish farms move farther offshore and into deeper waters,
monitoring the environment around them poses bigger challenges.
A multi-partner project led by the Huntsman Marine Science Centre
(HMSC), St. Andrews, New Brunswick, is evaluating the use of remotely
operated vehicles, or ROVs, for aquaculture in general and sediment
analysis in particular. While the HMSC sees a number of potential
uses for ROVs in research and education, this particular project
focuses on environmental monitoring of aquaculture. As fish farms move farther offshore and into deeper waters,
monitoring the environment around them poses bigger challenges.
A multi-partner project led by the Huntsman Marine Science Centre
(HMSC), St. Andrews, New Brunswick, is evaluating the use of remotely
operated vehicles, or ROVs, for aquaculture in general and sediment
analysis in particular. While the HMSC sees a number of potential
uses for ROVs in research and education, this particular project
focuses on environmental monitoring of aquaculture.
Aquaculture today involves the farming of diverse organisms
including fish, molluscs, crustaceans and aquatic plants. It is
the fastest growing food production sector in the world. Consumers,
regulators and public interest groups concerned about the environmental
impacts of fish culture operations are increasingly challenging
fish farmers. As a result, regulatory agencies have developed
monitoring programs to address the environmental concerns raised
by the discharge of organic waste into the surrounding water body.
Effective and efficiently delivered environmental monitoring
programs can help aquaculture grow in a socio-economically and
environmentally sustainable manner. Monitoring the effect a fish
farm has on its surroundings allows for regulation and modification
of operations to keep impacts to an acceptable and manageable
level. This is done by studying the ocean floor under and surrounding
the cage, or net pen, to see how much waste is accumulating. Monitoring
typically involves visual inspection and evaluating how much organic
loading from fish feces and uneaten food has disturbed the natural
ecology.
 In most jurisdictions, field data currently are collected with
sediment samples for geochemical or biological analysis, combined
with a video survey of the sea floor. Currently, commercial divers
collect this information. However, as the trend in aquaculture
towards deeper sites offshore continues, it is becoming more difficult
and dangerous to use divers. Recent innovations in aquaculture
methods, the lack of suitable aquaculture sites near-shore and
the requirements of species new to aquaculture all are contributing
to the growing trend towards offshore aquaculture. In most jurisdictions, field data currently are collected with
sediment samples for geochemical or biological analysis, combined
with a video survey of the sea floor. Currently, commercial divers
collect this information. However, as the trend in aquaculture
towards deeper sites offshore continues, it is becoming more difficult
and dangerous to use divers. Recent innovations in aquaculture
methods, the lack of suitable aquaculture sites near-shore and
the requirements of species new to aquaculture all are contributing
to the growing trend towards offshore aquaculture.
Because there are limitations in using divers for environmental
monitoring, there is a need for reliable and consistent data collection
at the deeper sites. HMSC’s new division, the International
Aquaculture Innovation Centre (IAIC), is a pre-commercial testing
facility addressing the issue. IAIC investigates issues challenging
sustainability and productivity of the aquaculture sector.
Gerhard Pohle, senior research scientist at HMSC, started the
ROV project after hearing about a conversation between William
Robertson, HMSC’s new executive director, and Larry Ingalls,
president of Ocean Horizons Ltd., a salmon-farming company. “Bill’s
experience in aquaculture operations and Larry’s desire to
adapt monitoring to the industry moving offshore led us to investigate
ROVs as a possible alternative to scuba divers for work at deeper
sites,” said Pohle. ROVs are unmanned submersibles; they
are not constrained by the depth limitations of divers, and they
may be a safer and more efficient method of collecting data at
deeper sites.
ROVs are seeing increasing applications ranging from oil platform
and pipeline maintenance to underwater tree log recovery and deep-sea
exploration. This project is pioneering ROV use in environmental
monitoring for the aquaculture industry.
 Realizing the large scope and cross-jurisdictional application
of this project, institutions from both sides of the U.S.-Canada
border cooperated and contributed in the undertaking. With the
help of the New Brunswick Environmental Trust Fund, the Gulf of
Maine Council on the Marine Environment, the Canadian Industrial
Research Assistance Program of the National Research Council,
Business New Brunswick and Ocean Horizons, the HMSC was able to
purchase and deploy a Stealth 2 ROV from Shark Marine Technologies
Inc., St. Catharines, Ontario. Fisheries and Oceans Canada also
contributed training in geochemical sample analysis and advice
on the design and specifications of the sediment sampler. Realizing the large scope and cross-jurisdictional application
of this project, institutions from both sides of the U.S.-Canada
border cooperated and contributed in the undertaking. With the
help of the New Brunswick Environmental Trust Fund, the Gulf of
Maine Council on the Marine Environment, the Canadian Industrial
Research Assistance Program of the National Research Council,
Business New Brunswick and Ocean Horizons, the HMSC was able to
purchase and deploy a Stealth 2 ROV from Shark Marine Technologies
Inc., St. Catharines, Ontario. Fisheries and Oceans Canada also
contributed training in geochemical sample analysis and advice
on the design and specifications of the sediment sampler.
“While ROVs have been around for some time,” Pohle
noted, “it has only been in recent years that costs have
become reasonable for smaller organizations such as ours. As in
the computer industry, with costs coming down, capabilities of
ROVs have actually gone up.” Other than cost, size and weight
are particularly important factors, he said, because transportability
and ease of handling on board vessels are essential. This particular
machine is relatively small, and with a weight of about 45 kilograms
(100 pounds), does not require any special gear to get onto a
boat or in and out of the water. “Basically, we can pack
everything into a 1.2-by-0.9-meter (4-by-3-foot) container and
head off to wherever we are needed,” he said.
The ROV is rated to a depth of 305 metres (1,000 feet), and
so is capable of monitoring deep water sites where monitoring
would have been impractical or incomplete in the past.
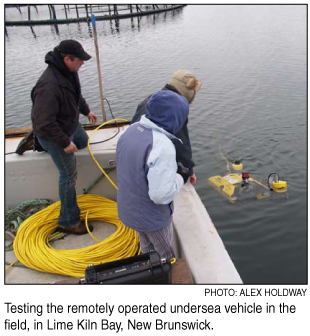
The ROV is operated with a computer topside that is connected
to the vehicle by a 305-metre (1,000-foot) umbilical cable. The
ROV pilot commands the ROV via a computer using a wireless controller
device. For navigation, the pilot uses a live video feed, scanning
sonar that works like radar to detect obstacles, and a tracking
system that displays the ROV’s precise position relative
to the deployment vessel.
In addition to a standard grappling arm, the ROV is equipped
with two video cameras, one color and the other a low-light, black-and-white
camera, useful in deep water or when using the two floodlights
is not helpful. “This is the case when light reflects back
from suspended matter close by or when the lights attract so many
organisms that they interfere with visibility,” Pohle noted.
Cameras are principally used for navigation of the ROV and
to run video for environmental monitoring. They are crucial for
using the unique sediment sampler. Development of the sampler
was key to the success of this project, as obtaining undisturbed
sediment samples is necessary for proper analysis. “We needed
to obtain at least the top two centimetres (0.8 inch) of sediment
in an ‘as-is’ state to correctly determine surface conditions,”
Pohle said. It is important that the sediment sample is undisturbed
because the required geochemical information is in the top 2.54
centimetres (1 inch) of the sediment.
In order to accomplish this with an ROV, the HMSC commissioned
a sampling apparatus developed specifically for this purpose.
The sediment sampler uses a pneumatic piston powered by a small
air tank to push in and retract a triplicate set of sampling tubes
from the sediment. Custom-made, one-way valves prevent the loss
of material when the sample is retracted. A rotating carousel
then moves the tubes out of the way and brings another set of
triplicate tubes into deployment position to take the next set
of samples. Watching this on screen, the operator can make adjustments
in positioning the tubes. In this way, three triplicate samples
can be taken per dive. Obtaining triplicate samples increases
statistical confidence in the results and gives an indication
of variability.
 The usefulness of ROV technology in aquaculture monitoring
can be seen in favourable costs and clear safety benefits, particularly
at deep water sites. Other advantages to the fish farmer include
real-time video feedback at the surface so that farm management
can instantly adjust operations, such as changing feeding schedules.
The ROV also can be more frequently deployed, allowing more feedback
to the operator and the ability to mitigate environmental impacts
as they occur. The usefulness of ROV technology in aquaculture monitoring
can be seen in favourable costs and clear safety benefits, particularly
at deep water sites. Other advantages to the fish farmer include
real-time video feedback at the surface so that farm management
can instantly adjust operations, such as changing feeding schedules.
The ROV also can be more frequently deployed, allowing more feedback
to the operator and the ability to mitigate environmental impacts
as they occur.
The ROV presently is undergoing a factory refit to enhance
it with a laser scaling system for determining the size of objects
during visual surveying. Improvements are being made to the positioning
system, and on-screen readouts of water temperature will be available.
A clamshell sampler that can take larger volumes of material,
such as for faunal analysis, also is being field-tested.
The HMSC hopes this new technology will be adopted by the aquaculture
industry, particularly at offshore sites, to promote sustainability.
It could provide uniform and efficient environmental monitoring
of sites as well as broaden the information made available to
farmers. The ROV has the potential to make environmental monitoring
safer, simpler and more efficient. Beyond aquaculture, HMSC Director
Robertson sees potential for a variety of uses of the ROV that
include enhancing education and research programs “that we
are only beginning to explore.”
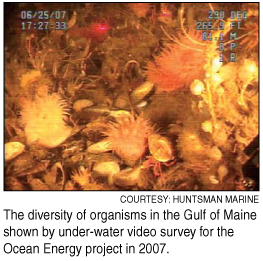
For example, since the fish farm project, the ROV has been
used on a number of missions related to ocean energy extraction
in the Bay of Fundy. A renewable resource that can meet the social
standards of sustainability, tidal in-stream energy development
is currently a major area of activity in both Canada and the United
States. With its high ocean tidal cycles, the Bay of Fundy is
of particular interest. The HMSC ROV has been used over the last
six months to characterize physical and biological attributes
of potential sites using videography. This included a number of
successful fly-through dives at depths exceeding 100 metres (328
feet), at sites in Head Harbour Passage and Western Passage near
the Canada/U.S. border that experience current speeds of up to
6 knots.
The ROV collected important evidence on substrate suitability
and biological diversity that will help in the overall assessment
in terms of impact and resource potential.
Rebecca Milne works at Huntsman Marine Science Centre in
St. Andrews, New Brunswick, as an ROV and lab technician. Gerhard
Pohle is senior research scientist at the Centre. The aquaculture
research in this story was funded by a grant from the Gulf of
Maine Council on the Marine Environment, which also sponsors The
Gulf of Maine Times.
|